 da
da de
de en
en es
es fr
fr nb
nb nl
nl pt
pt sv
sv fi
fi- Pagina principale
- Novità
- Come Automotive Ethernet Contribuisce allo Sviluppo dei Controller di Dominio
Come Automotive Ethernet Contribuisce allo Sviluppo dei Controller di Dominio
In passato ogni unità di controllo dell'auto funzionava in modo completamente autonomo e quindi aveva i propri sensori e attuatori. Questi sensori e attuatori erano quindi collegati direttamente all'unità di controllo. Semplice ed efficace. Tuttavia, poiché il numero di sensori, attuatori e unità di controllo continuava ad aumentare, crescevano anche i cablaggi. Ben presto furono necessari letteralmente chilometri di cavi e il quadro generale era difficile da trovare. Era necessario apportare un miglioramento.
Ecco perché all'inizio degli anni '90 è stata introdotta la rete CAN. Le unità di controllo erano in grado di scambiare informazioni tra loro, compresi i segnali dei sensori. Una vera rivoluzione nel mondo automobilistico. Da allora, l’architettura di rete all’interno di un veicolo ha continuato a svilupparsi. Con l’arrivo dei propulsori elettrici e della tecnologia autonoma, nel prossimo futuro saranno sicuramente compiuti passi da gigante.

Ma questo significa anche che cambierà del tutto il modo in cui l’elettronica verrà implementata in un veicolo. Per farla breve: entro 10 anni un controller di dominio o un supercomputer sarà responsabile di tutte le funzioni dell’intero gruppo propulsore. L’ECU come lo conosciamo adesso avrà allora un ruolo più subordinato. Man mano che questi controller di dominio e le reti associate continuano a svilupparsi, le singole unità di controllo scompariranno lentamente (sì, anche l’ECU), finché alla fine solo una manciata di controller di dominio o supercomputer regnerà sul campo.
Ma prima vogliamo spiegare qualcosa in più sulla rete che svolgerà un ruolo importante in tutto questo. Nonostante il fatto che Automotive Ethernet sia disponibile già da diverso tempo, la sua ingegnosità sta aumentando.
L'inizio: un gateway centrale
L'industria automobilistica è costantemente alla ricerca di più velocità dei dati e di più possibilità di comunicazione reciproca. Già nel 2004, durante lo sviluppo della rete FlexRay, le case automobilistiche si resero conto che dovevano intraprendere una nuova strada in termini di comunicazione tra le varie centraline. La dimensione degli aggiornamenti software stava sfuggendo di mano e con la velocità dell'HS CAN utilizzato in quel momento, un aggiornamento avrebbe richiesto letteralmente dozzine di ore. Una situazione impraticabile, ovviamente.
La soluzione è arrivata nel 2008 sotto forma di un gateway centrale, che non solo aveva il compito di scambiare dati tra le diverse reti CAN, FlexRay e MOST (Media Oriented Systems Transport) esistenti, ma fungeva anche da interfaccia verso il mondo esterno per diagnosi e programmazione (aggiornamenti software, ecc.). La BMW è stata la prima ad avere un portale centrale così nuovo.
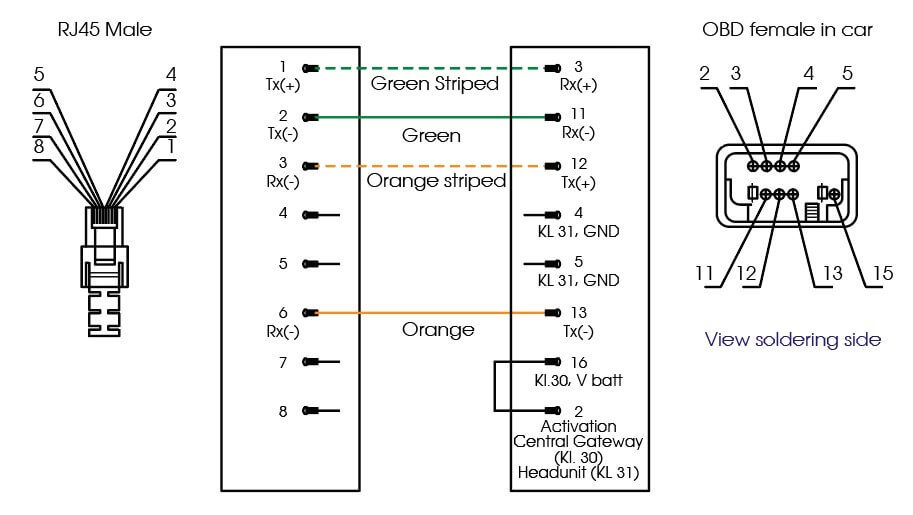
Immagine: i pin 3, 11, 12 e 13 nella porta OBDII vengono utilizzati per comunicare con il mondo esterno tramite una connessione Ethernet
Quindi la porta OBDII non aveva più due linee CAN per far comunicare l'attrezzatura del concessionario con l'auto, ma quattro linee Ethernet, che corrispondono esattamente al connettore RJ-45 che conosciamo molto bene dall'Ethernet nelle reti informatiche. I pin 3, 11, 12 e 13 della porta OBDII vengono quindi utilizzati per comunicare con il mondo esterno tramite una connessione Ethernet.
Standard Ethernet Automobilistico: 100BASE-T1
La tecnica Ethernet ovviamente esiste già da un po'. Ma non c’era alcuna applicazione per l’industria automobilistica a causa dei requisiti molto severi per i chip e altri componenti elettronici. Fino al 2004 Ethernet non era mai stata utilizzata nei veicoli e quindi è stato necessario sviluppare una gamma completamente nuova di chip, semiconduttori e interruttori appositamente per questi scopi. Anche il cablaggio è stato una sfida, perché per diversi motivi si desiderava raggiungere 100 Mbps su un cavo a doppino intrecciato non schermato (un cavo proprio come CAN e FlexRay). Il risultato finale è un nuovo standard Ethernet specifico per l'industria automobilistica: 100BASE-T1. È stato introdotto nel 2013 e aveva una velocità dati di 50 Mbps. Nel 2020 è stato introdotto il 1000BASE-T1, che può fornire una velocità dati di 1000 Mbps (1 Gbps).
Possibilità per il Futuro
Da quando Ethernet è diventata parte integrante della vita quotidiana, le possibilità sono infinite. Con l’arrivo di Automotive Ethernet la tecnologia informatica degli attuali PC, laptop e tablet potrà essere implementata anche nei veicoli. Ciò significa anche che la potenza di calcolo grafica per la guida autonoma non è più un problema.
Per avere un quadro chiaro della trasformazione nell’architettura di rete, è necessario rendersi conto di come è organizzata la comunicazione negli attuali veicoli (di terza generazione). Nell'immagine seguente, il gateway centrale è mostrato come il blocco viola più grande. I blocchi verdi più piccoli sono unità di controllo che dispongono ciascuna della propria rete di comunicazione: LIN, CAN o FlexRay.
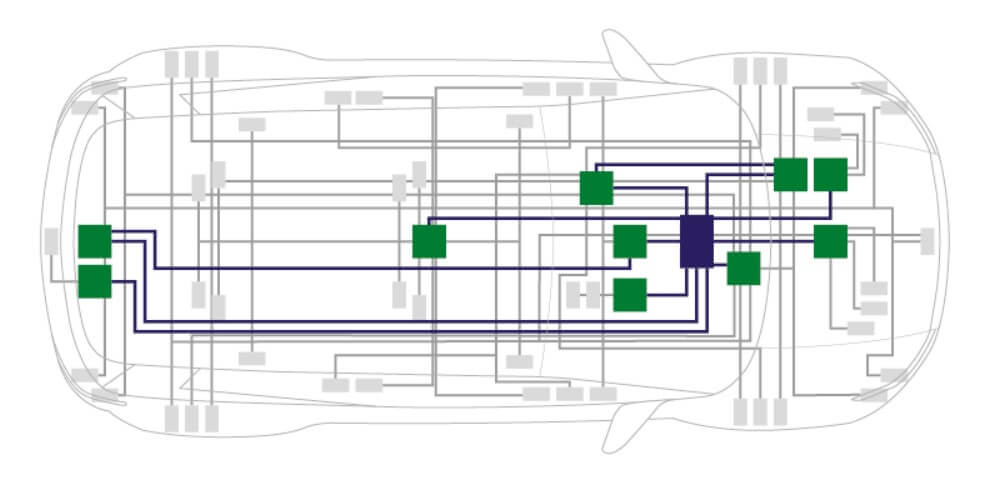
Immagine: architettura della rete di comunicazione negli attuali veicoli (di terza generazione)
Tuttavia, il numero delle unità di controllo sta sfuggendo di mano e le unità di controllo attuali non saranno più in grado di far fronte ai loro compiti nel prossimo futuro. I controller di dominio saranno quindi posizionati sotto il gateway centrale, e tutti comunicheranno anche tramite Ethernet (anch'esso mostrato in viola). Uno di questi controller di dominio si concentrerà esclusivamente su tutti i dati e le funzioni relative alla guida autonoma. In questa rete di 4a generazione sicuramente esisteranno ancora centraline e sottoreti, ma la rete avrà la velocità dove serve.
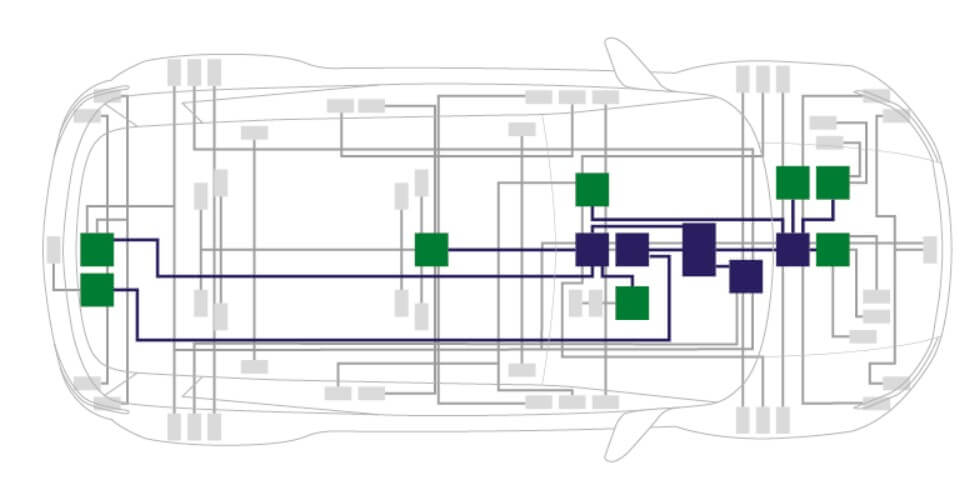
Immagine: architettura della rete di comunicazione nei veicoli del prossimo futuro (4a generazione)
È difficile prevedere esattamente come sarà nella pratica una rete di quinta generazione, ma dopo l’implementazione dei controller di dominio si prevede una tendenza chiara: la struttura diventerà notevolmente meno complessa grazie alla massiccia riduzione dei componenti. L’arrivo di sensori e attuatori intelligenti renderà completamente superfluo l’uso delle unità di controllo. Ciò che rimane è una rete leggera ma potente di pochi controller di dominio o supercomputer che gestiranno tutti i sistemi all’interno del veicolo lavorando a stretto contatto.